


一、平臺整體功能介紹
RZ9667型自控/計控技術實驗平臺,采用模塊化結構,可由學生自主搭建各種電路,可有效支撐《自動控制原理》,《計算機控制原理》,《智能控制技術》等課程的實驗實訓及課程設計要求。
該平臺可采用滿足兩種實驗模式,還包含提供了基于B/S架構的服務器端和客戶端功能,可以進行實驗平臺的遠程訪問。
系統硬件組成如下圖所示,系統整體包含四個部分:基礎硬件設備平臺、內置儀器儀表、系統模擬單元、可控單元(步進電機,直流電機,爐溫控制)。
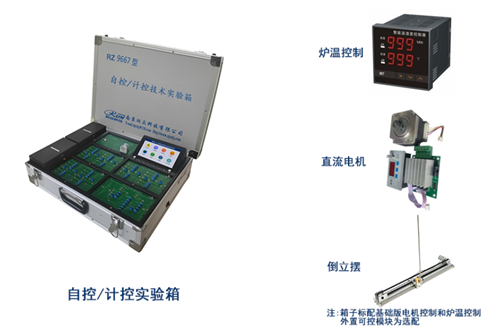
系統硬件結構圖
各個部分承載不同的功能,其中:
硬件平臺是整個實驗系統的載體,作為實際的可控對象,結合儀器儀表,完成基礎理論實驗的驗證分析過程;
本地PC端上層軟件提供基礎的儀器儀表模塊(信號源,示波器)及數據分析工具;
另外系統如果需要完成二次開發,還應當配套對應的開發工具軟件,如labview,Matlab/Simulink等。
二、本地端上層軟件
實驗平臺配備PC后,可連接本地端上層軟件,在計算機上完成對應實驗的操作。
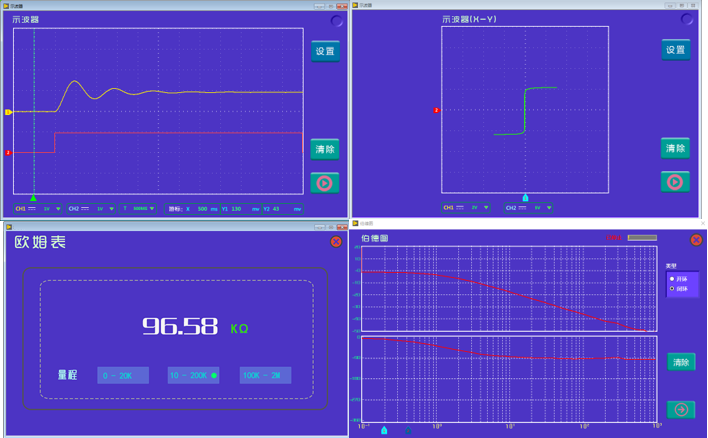
(1)內置儀器儀表
(2)上層軟件及實驗效果截圖
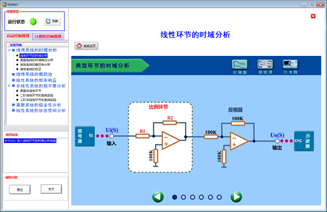
軟件界面參考
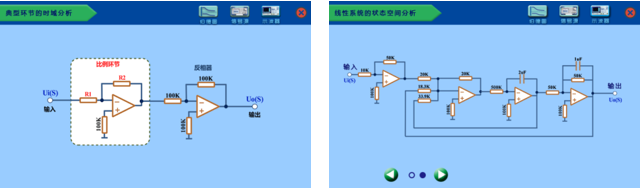
實驗框圖(參考)
三、平臺特點
平臺特色:
(1)平臺采用主板+模塊化的結構,各個模塊功能獨立,分布合理,方便系統的擴展和設備的維護;
(2)人機交互模塊功能:平臺同時支持,7寸TFT液晶顯示屏,支持實驗框圖的顯示,信號源的設置,示波器波形及多種類型儀器儀表狀態顯示;
(3)平臺內置雙通道數字示波器,支持雙通道時域波形的實時顯示,支持Y-T和兩種X-Y顯示模式,示波器內置含數顯的雙游標測量,可跟蹤游標的測量值,計算游標的時間差,幅度差等。
(4)系統內置伯德圖/奈奎斯特圖功能,可在系統分析時通過自動方式(非手動打點)得到閉環、開環對數幅頻、相頻特性曲線;閉環、開環可自由切換,可通過測量系統閉環伯德圖/奈奎斯特圖自動轉換為開環伯德圖/奈奎斯特圖;
(5)模擬單元模塊:配備不少于8組各種環節模塊(比例,積分,微分等),參數配備豐富,可搭建線性和非線性環節模擬電路,計控電路,二階三階實驗電路,典型系統時域響應及穩定性分析電路,系統校正和根軌跡狀態空間分析電路,各種形式和階次的模擬環節和控制電路;
(6)可控單元模塊:包含模擬爐溫控制系統,支持爐溫檢測及加熱控制,支持PID參數調節及算法的自主設計;直流電機控制(支持直流電機脈沖測速輸出及電壓測速輸出)系統,步進電機控制,支持PID參數調節及算法的自主設計;提供各種控制算法的二次開發;
(7)一階倒立擺模塊(選配):支持PID算法在到倒立擺系統的控制算法開發,支持倒立擺穩定狀態數據采集及分析;
一階線性倒立擺 一階環形倒立擺
(8)硬件平臺可連接matlab/Simulink,labview軟件,支持matlab下m語言開發,labview開發及C語言等多種形式的二次開發。
